NO.1: Cyfe
NO.2: Databox
김호영 서울대 기계공학부 교수 연구팀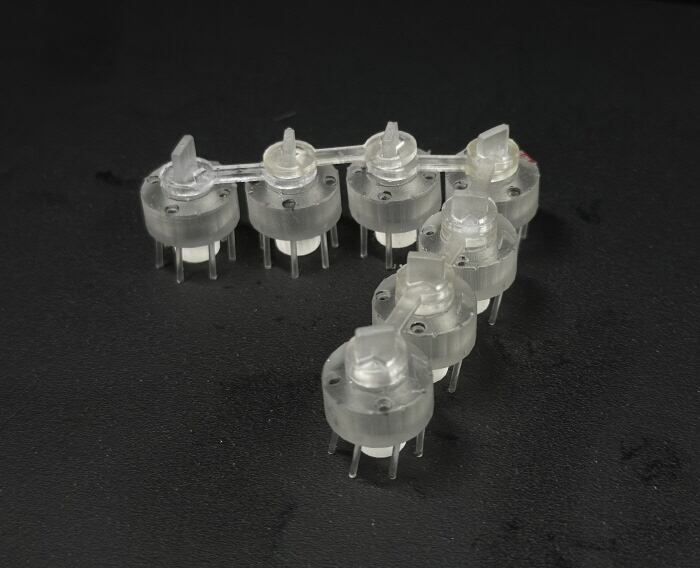

개미 같은 군집 생명체에서 아이디어를 얻어서 별도의 제어 없이 스스로 이동이나 탐사,운반 같은 임무를 수행할 수 있는 차세대 군집 로봇 시스템이 나왔다.
김호영 서울대 공과대학 기계공학부 교수 연구팀은 하버드대와의 공동 연구를 통해 입자 간 단순한 연결을 통해 정교한 제어 없이 다양한 동작을 수행할 수 있는 군집 로봇‘링크봇(Link-bot)’을 개발했다고 12일 밝혔다.연구 결과는 국제 학술지 사이언스 어드밴시스에 지난 9일 게재됐다.
일반 로봇와 드론으로 구성되는 군집 로봇은 지도 작성이나 장애물 회피,인증 토토 사이트 베스트 온라인 카지노물체 운반 등 다양한 작업을 수행할 수 있다.하지만 군집 로봇을 작동하려면 고성능 정밀 센서와 통신 장치,복잡한 제어 알고리즘이 필요하다.개별 로봇에 일일이 정밀한 위치 인식,충돌 방지,실시간 데이터 처리 같은 기능을 탑재해야 하고,그나마도 통신이 원활하지 않은 환경에서는 로봇의 성능이 급격하게 저하됐다.
연구팀은 자연의 개미 떼가 단순한 개체들이 모여 복잡한 행동을 발현하는‘창발적 집단 행동’을 하는 것에 착안해,중앙 제어나 센서 없이 자율적으로 움직이는 군집 로봇 시스템을 떠올렸다.
연구팀이 만든 링크봇은 방향성을 가진 능동 입자들이 V자의 체인 구조로 연결된 형태로 구성된다.입자 간 이동과 회전을 단순한 링크 구조로 제한하기만 하면,링크봇은 별도의 지능 없이도 마치 하나의 생명체처럼 유기적으로 움직인다.링크봇의 형태 변화나 동작은 링크 구조의 기하학적 조절을 통해 제어했다.
연구팀은 링크봇이 직진,정지,스포츠분석 사이트방향 전환 등 다양한 움직임을 수행할 수 있다는 점을 확인했다.좁은 공간이나 복잡한 지형을 통과하거나,구조물의 틈새를 차단하고 외부 물체를 감싸서 운반하는 기능도 구현했다.여러 대의 링크봇이 협력해 개별 개체로는 수행이 어려운 작업도 해냈다.또 링크봇의 움직임을 정밀하게 분석하고,다양한 조건에서의 동작을 예측할 수 있는 계산 모델도 함께 개발했다.
김호영 교수는 “이번 연구는 단순히 링크 모양만 바뀌어도 군집 로봇이 창발적 행동을 발현할 수 있음을 실험적으로 증명한 것”이라며 “이는 저비용의 자율 소프트 로보틱스와 차세대 집단 지능 시스템의 새로운 가능성을 제시할 것으로 기대된다”고 말했다.
연구팀은 링크봇을 발전시키면 재난 구조,블록 체인 무역 금융험지 운송,환경 감시 등 다양한 분야에서 활용 가능한 차세대 군집 로봇을 만들 수 있을 것으로 기대했다.
참고 자료
Science Advances(2025),DOI : https://www.science.org/doi/10.1126/sciadv.adu8326
Databox
안전한 카지노 사이트카지노사이트검증사이트 - 2025년 실시간 업데이트:최 대변인은 “헌재의 결정이 법 집행을 명분으로 검찰이 저지르는 인권 침해에 대한 책임을 회피하는 논리로 쓰이지 않을까 두렵다”며 “헌재 결정이 ‘보복 기소’에 대한 면죄부가 될 수 없음을 안 검사와 검찰은 똑똑히 기억하라”고 강조했다.
안전한 카지노 사이트카지노사이트검증사이트,그리고 이건 도대체 이렇게 투명한 권력이 있을 수 없다.